




gearCONTROL.846




Technische Daten.
8 Kanäle 4 Licht 6 Sequenzen
Bedienanleitung.




gearCONTROL.846
Handbuch
PC-Bediensoftware
V1.1.0
Mikrosteuerung.
• für Fahrwerk, • Fahrwerksklappen, • Licht • Sonderfunktionen Die gearCONTROL.846 wurde ursprünglich konzipiert, um für die glatt CAD D.H. 88 Comet eine Fahrwerkssteuerung für ihr spindelgetriebenes Fahrwerk anbieten zu können. Doch der kleine auf einer ARDUINO ® Plattform aufsetzende Controller hat weit mehr drauf!Funktionen.
Im Flug- und Funktionsmodellbau kann die gear CONTROL .846 vielfältige Steuerungsaufgaben übernehmen - in Kurz - form: • Freies Ansteuern von bis zu 8 Servos oder Fahrtreglern (Kanäle) für Fahrwerksbeine, Fahrwerksklappen, Speedbrakes, usw. • Einlesen von bis zu 8 Endschaltern (für die Ansteuerung von Fahrtreglern). • 8 konfigurierbare Einfahr-/ Ausfahrzeiten. • 4 Sonderkanäle, z.B. für Licht, Blinklicht, Doppelblitz, rotating beacon, an-/abschwellend, usw.; pos. u. neg. Logik! • Berücksichtigung von Abhängigkeiten der Kanäle und Sonderkanäle in bis zu 6 gleichzeitig ablaufenden Sequenzen. • Laufzeitüberwachung für Fahrtregler. • Direkte Beeinflussung der Sonderkanäle über zweiten RC-Kanal des RC-Senders, mittels Taster oder Schalter mit je bis zu 8 verschiedenen Positionen. • Fahrwerk- und Lichtverhalten alternativ steuerbar über einen oder zwei RC-Kanäle. • Mehrere Sonderkanäle schaltbar über eine Schalter- oder Tasterstellung. • Jeder Sonderkanal steuerbar durch mehrere Schalter- oder Tasterstellungen. • Getrennte Stromversorgungsanschlüsse verfügbar für gearCONTROL.846, Servos und Sonderkanäle.



Schaltbeispiele.
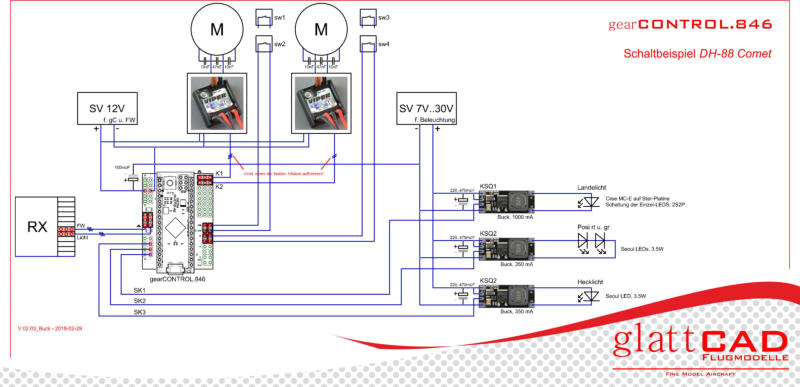
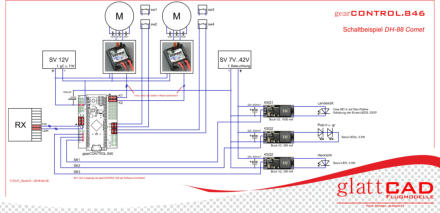
Die Hauptfunktion der gear CONTROL.846 liegt in der Ansteuerung von Fahrt-/Flugreglern und Servos, die in beliebiger Mischung Fahrwerke, Türen, Tore, Klappen, Bremsen usw. ansteuern können. Die vier zur Ansteuerung von Beleuchtung und freien Funktionen vorgesehenen Ausgänge der Sonderkanäle (SK1 bis SK4) können mittels der gear CONTROL.846 PC-Software für positive oder negative Anschaltungen verwendet werden. Es lassen sich also Konstantstromquellen verwenden deren Steuereingänge positive oder negative Signallogik erwarten. So kann einer Vielzahl im Handel erhältlicher Bausteine genutzt werden kann. Die beiden Skizzen unten zeigen dies beispielhaft für die Verwendung von „BUCK“ Konstantstromquellen zur Ansteuerung von High-Power LEDs der Landelichter, der beiden Positionslichter (rot und grün) und des weißen Hecklichts der glatt CAD D.H. 88 Comet . Im Bild zu sehen sind auch der RC-Empfänger (RX), die beiden Fahrwerksmotoren (M) nebst zugehörigen Viper Micro Marine Fahrtreglern, sowie die Stromversorgung für den Fahrwerksantrieb (12V) und die Beleuchtung (7 ..30V).
Bild 1: Anwendungsbeispiel für die Anschaltung von drei Konstantstromquellen mit negativer Eingangslogik (BUCK 440).
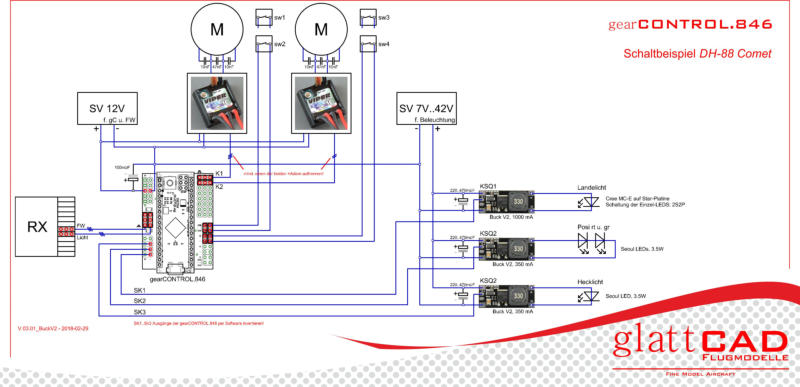
Bild 2: Anwendungsbeispiel für die Anschaltung von drei Konstantstromquellen mit positiver Eingangslogik (BUCK 330). Die betref-
fenden SKx-Ausgänge der gearCONTROL.846 sind dann zu invertieren.
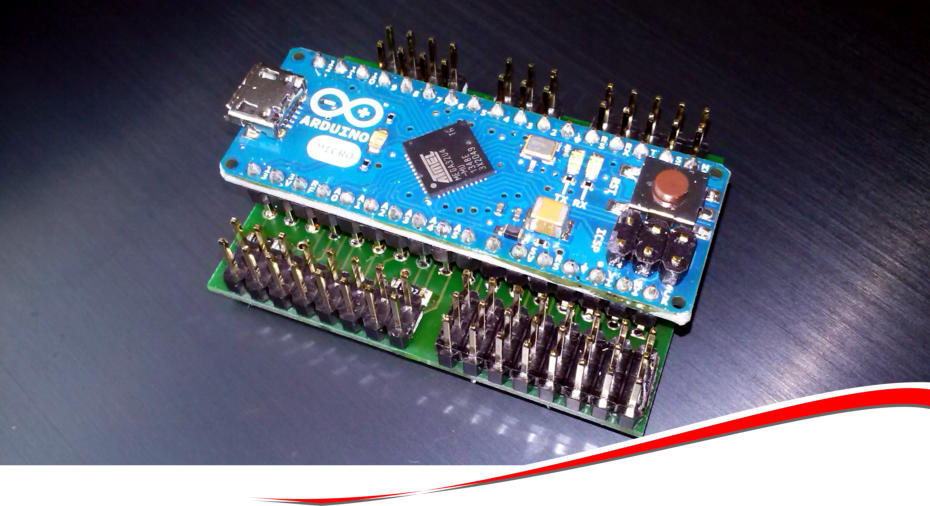
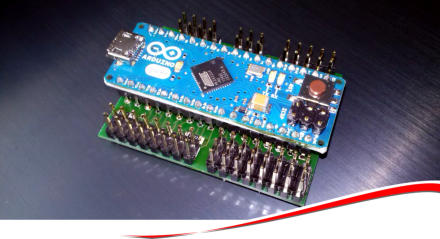
Zwei Komponenten.
Die gearCONTROL.846 besteht aus zwei Teilen: • Kleine Hardware-Baugruppe in Dual-Layer Technik (im Bild eine Laborversion), bestehend aus Mikroprozessor, Pro - gramm- und Datenspeicher, USB Port und einer ganzen Reihe an Anschlusspins, • PC Software, mit der man den die gearCONTROL.846 auf die gewünschte individuelle Anwendung anpassen kann.Software.
Für die Programmierung der gearCONTROL.846 auf einem Windows Rechner wurden drei Haupteingabemasken geschaf - fen. 1 . Kanal, 2 . Sonderkanal, 3 . Sequenz. Zusätzlich gibt es einen Dialog, um die vom RC Empfänger kommenden Signale zu konfigurieren und zu testen.2
.
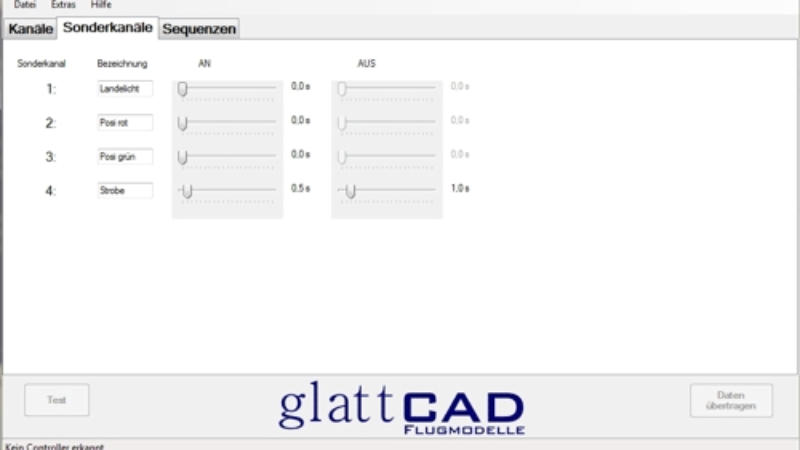
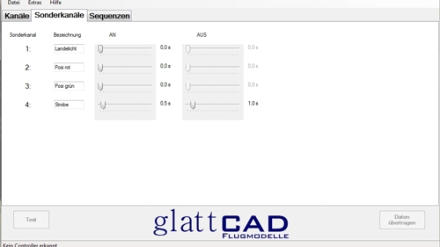
Sonderkanal.
Durch die Einbindung eines Sonderkanals in eine Abfolge von Aktionen ( Sequenz ) lässt sich beispielsweise ein Landeschein - werfer einschalten, nachdem das Bugfahrwerk ausgefahren wurde. Zusätzlich können Sonderkanäle über einen zweiten RC-Kanal unabhängig von den Sequenzen des Fahrwerks angesteuert werden. Mittels Programmierung der Fernsteuerung wird jeder Sonderkanal über einen eigenen Taster oder Schalter geschaltet. Auch Rotating Beacons, Blitzer und Blinklichter sind programmierbar!1
.
Kanal.
Die Einstellungen zu Kanal - Bild unten - beinhalten die folgende Konfigurationsmöglichkeiten für jeden der 8 Kanäle: • Typ des angeschlossenen Gebers (Servo oder Fahrtregler). • für Fahrtregler: o Geschwindigkeit des Fahrtreglers, getrennt für Ein- und Ausfahren. o Einstellung der Mitte (Spindelstillstand) zwischen vorwärts und rückwärts. o Überwachungszeit, nach welcher der Fahrtregler aus Sicherheitsgründen stoppt, falls kein Endschalter erreicht wurde. o Nummer des Endschalters, der die Endposition meldet, jeweils für Ein- und Ausfahren. • für Servo: o Endposition, jeweils für Ein- und Ausgefahren. o Startposition, beim Einschalten des Controllers. o Laufzeit zwischen den Positionen Ein und Aus.3
.
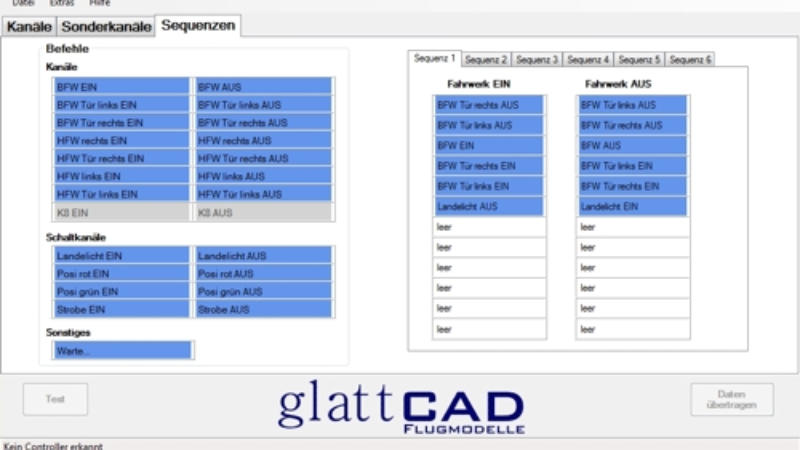
Sequenz.
Die Programmierung von Sequenzen erlaubt es, Kanäle und Sonderkanäle in eine gewünschte Reihenfolge zu bringen, in der sie angesteuert werden sollen. Bis zu 6 Sequenzen sind einfach programmierbar. So ist auch eine zeitlich parallele Ansteue - rung der Kanäle und Sonderkanäle möglich, z. B. die gleichzeitige Bewegung der einzelnen Fahrwerksbeine oder mehrerer Fahrwerksklappen. Es können Pausen eingefügt werden.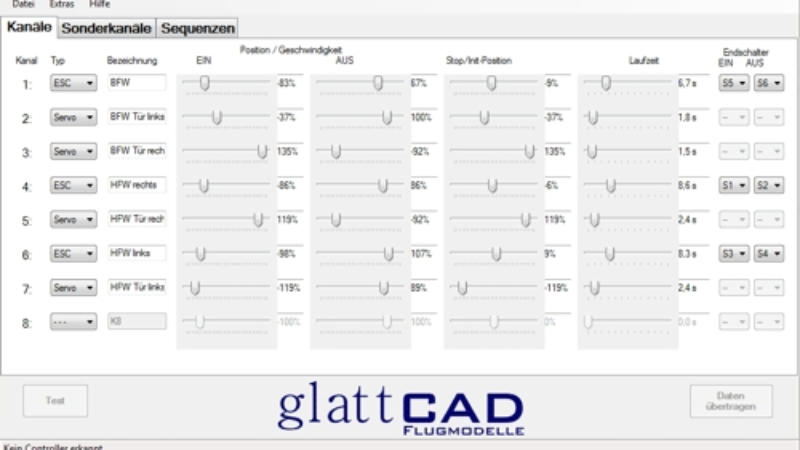
Testen - Übertragen - Los geht´s.
Mittels mehrerer Testfunktionen können alle eingegebenen Kanal - und Sonderkanal -Werte sowie die Sequenzen überprüft werden, noch bevor sie an die Hardware übertragen werden. So kann man die über USB mit dem PC verbundene gear - CONTROL .846 und die spätere Wirkung der Betätigung der Geber am RC-Sender sofort in Aktion erleben.





© 2020-06 glattCAD Flugmodelle Christoph Glatt Bauernstr. 77 86462 Langweid am Lech
Info@glattCAD.de
















gearCONTROL.846







gearCONTROL.846
Handbuch
PC-Software
V1.1.0



Technische Daten
8 Kanäle 4 Licht 6 SequenzenBedienanleitung


Mikrosteuerung.
• für Fahrwerk, • Fahrwerksklappen, • Licht • Sonderfunktionen Die gearCONTROL.846 wurde ursprünglich konzi - piert, um für die glatt CAD D.H. 88 Comet eine Fahrwerkssteuerung für ihr spindelgetriebenes Fahrwerk anbieten zu können. Doch der kleine auf einer ARDUINO ® Plattform aufsetzende Controller hat weit mehr drauf!Funktionen.
Im Flug- und Funktionsmodellbau kann die gear - CONTROL .846 vielfältige Steuerungsaufgaben übernehmen - in Kurzform: • Freies Ansteuern von bis zu 8 Servos oder Fahrt - reglern (Kanäle) für Fahrwerksbeine, Fahrwerks - klappen, Speedbrakes, usw. • Einlesen von bis zu 8 Endschaltern (für die Ansteuerung von Fahrtreglern). • 8 konfigurierbare Einfahr-/ Ausfahrzeiten. • 4 Sonderkanäle, z.B. für Licht, Blinklicht, Doppel - blitz, rotating beacon, an-/abschwellend, usw.; pos. u. neg. Logik! • Berücksichtigung von Abhängigkeiten der Kanäle und Sonderkanäle in bis zu 6 gleichzeitig ablau - fenden Sequenzen. • Laufzeitüberwachung für Fahrtregler. • Direkte Beeinflussung der Sonderkanäle über zweiten RC-Kanal des RC-Senders, mittels Taster oder Schalter mit je bis zu 8 verschiedenen Posi - tionen. • Fahrwerk- und Lichtverhalten alternativ steuer - bar über einen oder zwei RC-Kanäle. • Mehrere Sonderkanäle schaltbar über eine Schal - ter- oder Tasterstellung. • Jeder Sonderkanal steuerbar durch mehrere Schalter- oder Tasterstellungen. • Getrennte Stromversorgungsanschlüsse verfüg - bar für gearCONTROL.846, Servos und Sonder - kanäle.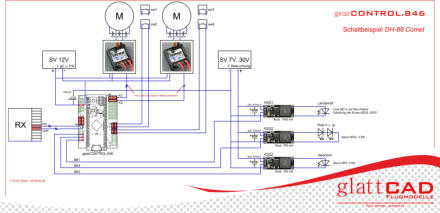
Schaltbeispiele.
Die Hauptfunktion der gear CONTROL.846 liegt in der Ansteuerung von Fahrt-/Flugreglern und Servos, die in beliebiger Mischung Fahrwerke, Türen, Tore, Klappen, Bremsen usw. ansteuern können. Die vier zur Ansteuerung von Beleuchtung und freien Funktionen vorgesehenen Ausgänge der Son - derkanäle (SK1 bis SK4) können mittels der gear - CONTROL.846 PC-Software für positive oder negative Anschaltungen verwendet werden. Es las - sen sich also Konstantstromquellen verwenden deren Steuereingänge positive oder negative Signal - logik erwarten. So kann einer Vielzahl im Handel erhältlicher Bausteine genutzt werden kann. Die beiden Skizzen unten zeigen dies beispielhaft für die Verwendung von „BUCK“ Konstantstromquel - len zur Ansteuerung von High-Power LEDs der Landelichter, der beiden Positionslichter (rot und grün) und des weißen Hecklichts der glatt CAD D.H. 88 Comet . Im Bild zu sehen sind auch der RC-Empfänger (RX), die beiden Fahrwerksmotoren (M) nebst zugehöri - gen Viper Micro Marine Fahrtreglern, sowie die Stromversorgung für den Fahrwerksantrieb (12V) und die Beleuchtung (7 ..30V).
Bild 1: Anwendungsbeispiel für die Anschaltung von
drei Konstantstromquellen mit negativer Eingangslogik
(BUCK 440).
Bild 2: Anwendungsbeispiel für die Anschaltung von
drei Konstantstromquellen mit positiver Eingangslogik
(BUCK 330). Die betreffenden SKx-Ausgänge der gear-
CONTROL.846 sind dann zu invertieren.
Zwei Komponenten.
Die gearCONTROL.846 besteht aus zwei Teilen: • Kleine Hardware-Baugruppe in Dual-Layer Tech - nik (im Bild eine Laborversion), bestehend aus Mikroprozessor, Programm- und Datenspeicher, USB Port und einer ganzen Reihe an Anschluss - pins, • PC Software, mit der man den die gearCON - TROL.846 auf die gewünschte individuelle Anwendung anpassen kann.Software.
Für die Programmierung der gearCONTROL.846 auf einem Windows Rechner wurden drei Haupteinga - bemasken geschaffen. 1 . Kanal, 2 . Sonderkanal, 3 . Sequenz. Zusätzlich gibt es einen Dialog, um die vom RC Emp - fänger kommenden Signale zu konfigurieren und zu testen.2
.
Sonderkanal.
Durch die Einbindung eines Sonderkanals in eine Abfolge von Aktionen ( Sequenz ) lässt sich beispiels - weise ein Landescheinwerfer einschalten, nachdem das Bugfahrwerk ausgefahren wurde. Zusätzlich können Sonderkanäle über einen zweiten RC-Kanal unabhängig von den Sequenzen des Fahr - werks angesteuert werden. Mittels Programmierung der Fernsteuerung wird jeder Sonderkanal über einen eigenen Taster oder Schalter geschaltet. Auch Rotating Beacons, Blitzer und Blinklichter sind pro - grammierbar!1
.
Kanal.
Die Einstellungen zu Kanal - Bild unten - beinhalten die folgende Konfigurationsmöglichkeiten für jeden der 8 Kanäle: • Typ des angeschlossenen Gebers (Servo oder Fahrtregler). • für Fahrtregler: o Geschwindigkeit des Fahrtreglers, getrennt für Ein- und Ausfahren. o Einstellung der Mitte (Spindelstillstand) zwi - schen vorwärts und rückwärts. o Überwachungszeit, nach welcher der Fahrt - regler aus Sicherheitsgründen stoppt, falls kein Endschalter erreicht wurde. o Nummer des Endschalters, der die Endposi - tion meldet, jeweils für Ein- und Ausfahren. • für Servo: o Endposition, jeweils für Ein- und Ausgefahren. o Startposition, beim Einschalten des Control - lers. o Laufzeit zwischen den Positionen Ein und Aus.3
.
Sequenz.
Die Programmierung von Sequenzen erlaubt es, Kanäle und Sonderkanäle in eine gewünschte Reihen - folge zu bringen, in der sie angesteuert werden sollen. Bis zu 6 Sequenzen sind einfach program - mierbar. So ist auch eine zeitlich parallele Ansteue - rung der Kanäle und Sonderkanäle möglich, z. B. die gleichzeitige Bewegung der einzelnen Fahrwerks - beine oder mehrerer Fahrwerksklappen. Es können Pausen eingefügt werden.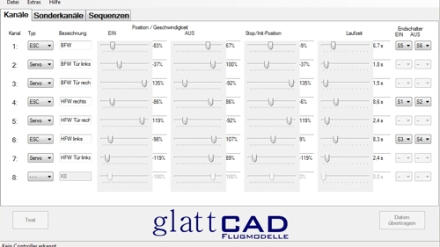

Testen
-
Übertragen
-
Los
geht´s.
Mittels mehrerer Testfunktionen können alle einge - gebenen Kanal - und Sonderkanal -Werte sowie die Sequenzen überprüft werden, noch bevor sie an die Hardware übertragen werden. So kann man die über USB mit dem PC verbundene gear CON - TROL .846 und die spätere Wirkung der Betätigung der Geber am RC-Sender sofort in Aktion erleben.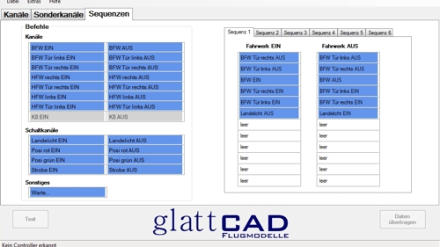
© 2020-06 glattCAD Flugmodelle Info@glattCAD.de
Christoph Glatt Bauernstr. 77 86462 Langweid am Lech







